在正式进入 VAE (Variational Autoencoder) 之前,我们先来看一个更简单也更直观的模型(也是 VAE 的前身):AutoEncoder (Hinton and Salakhutdinov 2006)。
如果用一句话概括,AutoEncoder 做的事情其实很简单:
把输入数据压缩成一个更紧凑的表示,再尽可能从这个表示中恢复出原始输入。
听起来,它有点像数据压缩机。比如一张图片本来有几百上千个像素,信息维度很高;AutoEncoder 会试图把它压到一个更低维的向量里,然后再从这个向量把原图重建出来。
这个过程看起来简单,却很重要。因为它告诉我们,神经网络不仅可以做分类,也可以学会一种对数据本身的内部表示。这正是后面理解 VAE 和 Diffusion,乃至扩散模型里潜空间的基础。
import math
import dnnlpy
import dnnlpy.nn as dnn
import matplotlib.pyplot as plt
import torch
import torch.nn as nn
import torch.optim as optim
import torch.utils.data as utils
import torchvision.datasets as datasets
import torchvision.transforms.v2 as v2
from sklearn.manifold import TSNE
from torch import Tensor
from torchmetrics import MeanMetric
from torchvision.utils import make_grid
plt.rc('figure', dpi=100)
print('PyTorch version:', torch.__version__)
PyTorch version: 2.12.1+cpu
dnnlpy.set_seed(42)
device = dnnlpy.get_default_device()
print('Using device:', device)
13.1.1 什么是 AutoEncoder
一个标准的 AutoEncoder 由两部分组成:
- Encoder(编码器):把输入 \(x\) 映射成一个低维表示 \(z\);
- Decoder(解码器):再把这个表示 \(z\) 还原成重建结果 \(\hat{x}\)。
写成公式就是:
\[
z = f_\theta(x)
\]
\[
\hat{x} = g_\phi(z)
\]
合起来也可以写成:
\[
\hat{x} = g_\phi(f_\theta(x))
\]
其中,\(x\) 是原始输入;\(z\) 是中间的隐藏表示(latent representation);\(\hat{x}\) 是模型重建出来的结果。
从结构上看,它像一个 U 型漏斗,前半部分把高维输入不断压缩,中间经过一个较小的瓶颈层,后半部分再把信息展开,还原回原空间。有一点 U-Net 的感觉,但它的目标不是分割,而是重建。
AutoEncoder 的核心结构经常长这样:
\[
x \rightarrow \text{Encoder} \rightarrow z \rightarrow \text{Decoder} \rightarrow \hat{x}
\]
到这里你可能会问,既然目标只是让输出尽量接近输入,那模型直接学一个恒等映射不就行了吗?
确实,如果不给任何限制,一个容量足够大的网络完全可能只是把输入原样抄一遍。那样虽然训练误差很小,但网络并没有学到什么有价值的东西。所以,AutoEncoder 的关键不在于输入等于输出,而在于模型必须经过一个受限制的中间表示 \(z\),才能完成重建。
这就像让一个人看完一张复杂图片后,只能用一句简短的话概括,然后再让另一个人根据这句话尽量把图片画回来。如果最后能画得还不错,说明这句概括确实抓住了图中的关键信息。
因此,AutoEncoder 的本质就是,在压缩过程中,强迫模型尽可能学习数据的有效表示。
13.1.2 训练目标:让重建尽可能接近输入
AutoEncoder 的训练非常直观:给定输入 \(x\),经过编码和解码得到 \(\hat{x}\),然后让 \(\hat{x}\) 尽量接近 \(x\)。
最常见的损失函数是重建误差(reconstruction loss):
\[
\mathcal{L}(x, \hat{x}) = \|x - \hat{x}\|^2
\]
也就是均方误差(MSE)。
如果输入是图像,而且像素值在 \([0,1]\) 之间,我们也可以用二元交叉熵(BCE):
\[
\mathcal{L}(x, \hat{x}) = - \sum_i \left[x_i \log \hat{x}_i + (1-x_i)\log(1-\hat{x}_i)\right]
\]
不管具体形式是什么,思想都一样:让模型学会从压缩表示中尽可能恢复原始数据。
所以 AutoEncoder 的优化目标可以写成:
\[
\min_{\theta,\phi} \mathbb{E}_{x \sim p_{\text{data}}}[\mathcal{L}(x, \hat{x})]
\]
这里并没有标签,不需要“猫”“狗”这样的监督信号。模型只需要数据本身,就能进行训练。因此 AutoEncoder 常被看作一种自监督 / 无监督表示学习方法。
以 MNIST 手写数字为例,一张图片大小是 \(28 \times 28\),总共有 784 个像素。我们可以设计一个 AutoEncoder:
- 输入层:784 维
- 编码器:784 → 256 → 64 → 16
- 解码器:16 → 64 → 256 → 784
- 输出层:784 维
这样,我们中间只保留一个 16 维向量 \(z\)。这意味着,每张数字图片都被压缩成一个 16 维的点。
如果训练得好,我们会发现:
- 相似的数字会被映射到相近的位置
- 不同类别的数字可能在潜空间里形成不同区域
- Decoder 可以从这些点大致重建出对应的数字形状
这说明 AutoEncoder 学到的不是每个像素单独怎么存,而是图像背后的更高层结构,比如笔画、形状、整体轮廓。这也是 latent space 这个概念第一次真正登场的地方。模型试图在一个更紧凑的空间里表示数据的本质结构。
13.1.3 AutoEncoder 学到了什么
AutoEncoder 学到的东西,可以从两个层面理解。
第一层:压缩表示
AutoEncoder 把原始高维数据变成一个更小的向量。这个向量通常不是人工设计的特征,而是网络自己学出来的。比如对于人脸图像,latent 向量里可能隐含了姿态、光照、轮廓、表情和局部纹理,这些因素不一定能被单独解释,但它们共同构成了对输入的某种编码。
第二层:数据结构
为了能成功重建输入,模型必须捕捉数据中的统计规律。所以 AutoEncoder 往往会学到数据中哪些模式经常出现,哪些特征是关键的,而哪些细节可以忽略。换句话说,它并不只是记住样本,而是在某种程度上学习了这类数据通常长什么样。
AutoEncoder 和 PCA 的关系
从某种角度看,AutoEncoder 可以被视为 PCA 的非线性推广。
PCA 做的是,把数据投影到一个低维线性子空间,并且尽量保留原数据的方差。而 AutoEncoder 做的是,用神经网络学习编码和解码,因此可以表示复杂的非线性映射。如果 AutoEncoder 只有一层线性 encoder 和一层线性 decoder,并使用 MSE 作为损失,那么它学到的子空间和 PCA 有紧密关系。
但神经网络的优势在于:真实数据往往不是分布在线性子空间上,而是落在某个复杂的非线性子空间附近。用更专业的术语来说,数据可能分布在一个复杂的低维流形(manifold) 上。因此,PCA 难以捕捉这种结构,而 AutoEncoder 得益于其灵活的非线性映射能力,能够更好地适应数据的内在几何形状。
所以相比 PCA,AutoEncoder 更适合图像、语音、文本等复杂数据。
13.1.4 AutoEncoder 的 PyTorch 实现
下面我们来看一个最简单的 AutoEncoder 实现。这里用全连接网络做编码和解码,适合用来理解基本流程。
这里我们定义了一个基本的 AutoEncoder 类,包含一个 encoder 和一个 decoder。编码器是一个两层的全连接网络,输入维度是 784(\(28\times 28\) 的图像展平),输出维度是 32(latent space 的大小)。解码器也是一个两层的全连接网络,把 latent 向量从 32 维还原回 784 维。
同时,由于我们使用了 v2.ToDtype(torch.float32, scale=True) 这个变换,输入的像素值会被归一化到 \([0,1]\) 之间。所以我们在 decoder 的最后加了一个 nn.Sigmoid() 激活函数,确保输出也在 \([0,1]\) 范围内。
class AutoEncoder(nn.Module):
"""A fully connected autoencoder for small image tensors."""
def __init__(
self,
input_shape: tuple[int, int, int],
hidden_dim: int = 256,
latent_dim: int = 32,
):
"""Initialize encoder and decoder networks."""
super().__init__()
self.latent_dim = latent_dim
input_dim = math.prod(input_shape)
self.encoder = nn.Sequential(
dnn.Flatten(), # 28x28 -> 784
dnn.Linear(input_dim, hidden_dim),
dnn.ReLU(),
dnn.Linear(hidden_dim, latent_dim),
)
self.decoder = nn.Sequential(
dnn.Linear(latent_dim, hidden_dim),
dnn.ReLU(),
dnn.Linear(hidden_dim, input_dim),
dnn.Sigmoid(),
dnn.Unflatten(1, input_shape), # 784 -> 28x28
)
def encode(self, x: Tensor) -> Tensor:
"""Encode inputs into latent vectors."""
z = self.encoder(x)
return z
def decode(self, z: Tensor) -> Tensor:
"""Decode latent vectors back to input-shaped tensors."""
x_hat = self.decoder(z)
return x_hat
def forward(self, x: Tensor) -> Tensor:
"""Reconstruct inputs through the encoder and decoder."""
z = self.encode(x)
x_hat = self.decode(z)
return x_hat
我们使用 MNIST 数据集来训练这个 AutoEncoder。每张图片被展平为一个 784 维的向量,输入到网络中。训练过程中,我们使用均方误差(MSE)作为损失函数,让模型学会从压缩表示中重建出原始图像。
可以看到,整个训练过程只做三件事:
- 输入图片 \(x\)
- 得到重建结果 \(\hat{x}\)
- 最小化它们之间的差异
这就是 AutoEncoder 最核心的训练逻辑。
root = dnnlpy.get_data_root()
transform = v2.Compose([v2.ToImage(), v2.ToDtype(torch.float32, scale=True)])
train_ds = datasets.MNIST(root, train=True, download=True, transform=transform)
test_ds = datasets.MNIST(root, train=False, download=True, transform=transform)
train_dl = utils.DataLoader(train_ds, batch_size=128, shuffle=True)
input_shape = (1, 28, 28)
model = AutoEncoder(input_shape).to(device)
optimizer = optim.Adam(model.parameters(), lr=1e-3)
loss_fn = nn.MSELoss()
loss_metric = MeanMetric().to(device)
num_epochs = 10
model.train()
for epoch in range(1, num_epochs + 1):
loss_metric.reset()
for x, _ in train_dl:
x = x.to(device)
x_hat = model(x)
loss = loss_fn(x_hat, x)
loss.backward()
loss_metric.update(loss.detach())
optimizer.step()
optimizer.zero_grad()
print(f'Epoch [{epoch:2d}/{num_epochs:2d}] | loss: {loss_metric.compute():.4f}')
Epoch [ 1/10] | loss: 0.0400
Epoch [ 2/10] | loss: 0.0151
Epoch [ 3/10] | loss: 0.0114
Epoch [ 4/10] | loss: 0.0097
Epoch [ 5/10] | loss: 0.0087
Epoch [ 6/10] | loss: 0.0080
Epoch [ 7/10] | loss: 0.0075
Epoch [ 8/10] | loss: 0.0071
Epoch [ 9/10] | loss: 0.0068
Epoch [10/10] | loss: 0.0066
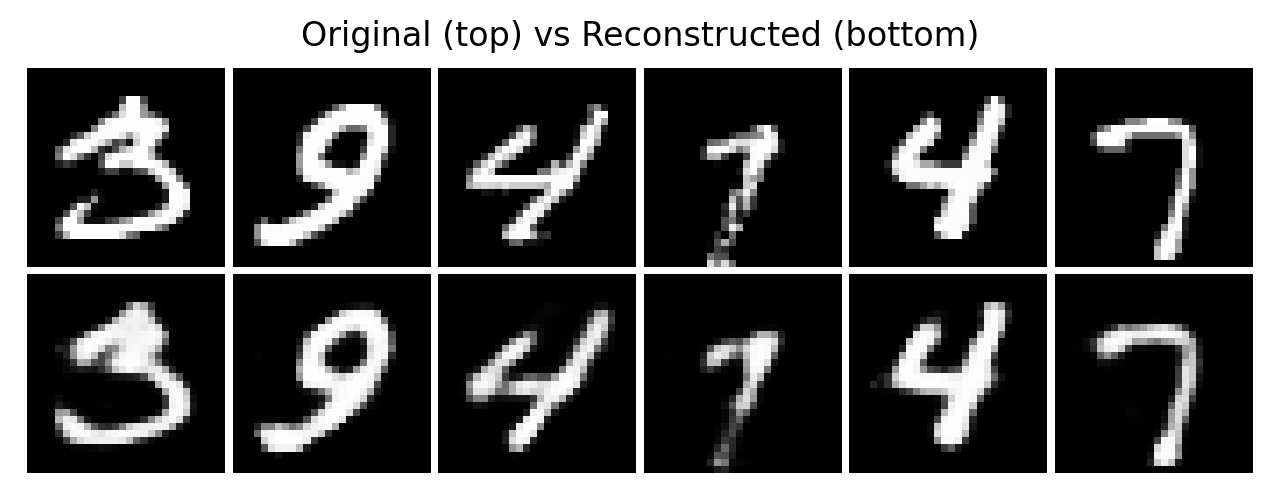
我们从测试集中随机采样 6 张图片,看看它们的重建效果。
num_samples = 6
samples_idx = torch.randperm(len(test_ds))[:num_samples]
original = [test_ds[int(idx)][0] for idx in samples_idx]
original = torch.stack(original, dim=0).to(device)
model.eval()
with torch.inference_mode():
reconstructed = model(original)
image_list = torch.concat([original, reconstructed], dim=0)
grid = make_grid(image_list, nrow=num_samples, padding=1, pad_value=1)
grid = grid.permute(1, 2, 0).numpy(force=True) # CxHxW -> HxWxC
fig = plt.figure(1, figsize=(8, 3))
ax = fig.add_subplot(1, 1, 1)
ax.imshow(grid, cmap='gray')
ax.axis('off')
ax.set_title('Original (top) vs Reconstructed (bottom)')
dnnlpy.set_matplotlib_format('highdpi')
plt.show()
可以看到,虽然重建的图像可能有些模糊,但整体轮廓和数字形状都能被还原出来。这说明 AutoEncoder 确实学到了输入数据的某种有效表示,而不是简单地记住每个像素值。
13.1.5 AutoEncoder 的局限性
虽然 AutoEncoder 能学到不错的表示,但它有一个很关键的问题:它学到的 latent space 不一定适合生成新样本。
为什么?难道我们不能直接从潜空间中采样一个 \(z\),然后让 decoder 从这个 \(z\) 生成一个新图像吗?
或许你已经发现了,我们从头到尾都没提到 \(z\) 到底服从一个什么分布。我们只是让模型学会把输入映射到某个 \(z\),然后再从这个 \(z\) 重建出输入。但我们并没有告诉模型,这些 \(z\) 应该分布在潜空间的什么位置,或者说应该服从什么样的概率分布。也就是说,普通 AutoEncoder 只要求输入能被 encoder 编码到某个 \(z\),然后 decoder 能从这个 \(z\) 把原图重建回来。它并没有约束所有 \(z\) 在潜空间中的分布形式。
但是,如果我们想要生成图像,我们需要从潜空间中随机采样一个 \(z\),然后让 decoder 从这个 \(z\) 生成一个新图像。问题是,由于我们没有对潜空间的分布进行任何约束,我们训练得到的潜空间可能和我们的采样空间完全不同。一旦我们随机采样一个 \(z\),很可能就落在了这些空洞当中。结果就是 decoder 可能会生成出毫无意义的图像,甚至完全随机的噪声。
更糟糕的是,AutoEncoder 训练得到的是一个 deterministic 的映射。也就是说,给定一个输入 \(x\),它总是被编码成同一个 \(z\)。这就导致了潜空间的分布非常不规整,甚至可能是离散的点云,而不是一个连续的、平滑的分布。
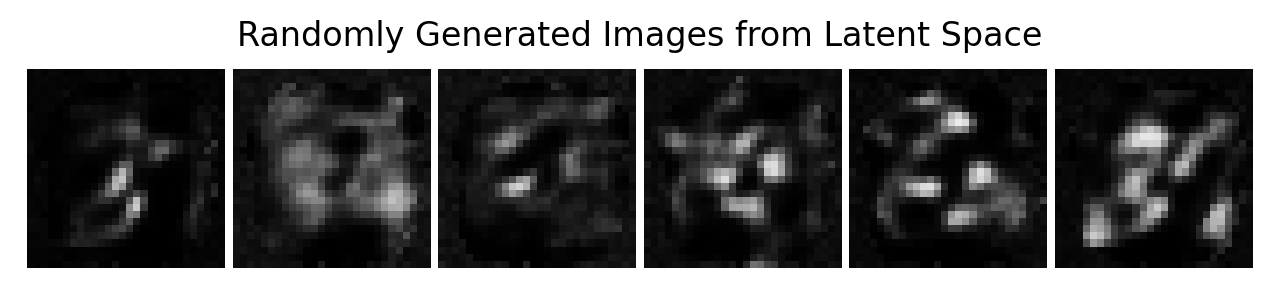
利用我们之前训练好的模型,现在我们从正态分布中随机采样几个 \(z\),看看 decoder 从这些随机 \(z\) 生成的图像是什么样子。
z = torch.randn(num_samples, model.latent_dim).to(device)
with torch.inference_mode():
x_hat = model.decode(z)
grid = make_grid(x_hat, nrow=num_samples, padding=1, pad_value=1)
grid = grid.permute(1, 2, 0).numpy(force=True) # CxHxW -> HxWxC
fig = plt.figure(2, figsize=(8, 2))
ax = fig.add_subplot(1, 1, 1)
ax.imshow(grid, cmap='gray')
ax.axis('off')
ax.set_title('Randomly Generated Images from Latent Space')
dnnlpy.set_matplotlib_format('highdpi')
plt.show()
你看,这些随机采样的 \(z\) 生成的图像多是结构混乱的模糊图像,而不是清晰的数字。因为训练过程中,decoder 只学习如何对 encoder 输出的那部分潜在表示进行重建,而没有学习如何处理整个潜在空间中的任意点。因此,当输入随机采样得到的 \(z\) 时,这些点往往落在训练时未覆盖或很少覆盖的区域,decoder 无法将其稳定映射为真实图像,只能输出失真的结果。
我们再来看看潜空间中的点分布情况。我们把测试集中的图片通过 encoder 映射到潜空间中,并用 t-SNE 进行可视化,看看它们的分布是什么样子的。
num_samples = 1000
samples_idx = torch.randperm(len(test_ds))[:num_samples]
samples_batch = [test_ds[int(idx)][0] for idx in samples_idx]
samples_batch = torch.stack(samples_batch, dim=0).to(device)
model.eval()
with torch.inference_mode():
z_list = model.encode(samples_batch)
z_list = z_list.numpy(force=True)
label_list = test_ds.targets[samples_idx].numpy()
Mdl = TSNE(n_components=2, random_state=42)
z_2d = Mdl.fit_transform(z_list)
fig = plt.figure(3, figsize=(6, 5))
ax = fig.add_subplot(1, 1, 1)
scatter = ax.scatter(z_2d[:, 0], z_2d[:, 1], c=label_list, s=8, alpha=0.7)
ax.set_xlabel('z1')
ax.set_ylabel('z2')
ax.set_title('Latent means of test samples')
fig.colorbar(scatter)
dnnlpy.set_matplotlib_format('svg')
plt.show()
你会发现,潜空间中的点分布非常不规整,甚至可能形成一些离散的簇。这些簇对应着训练数据中不同类别的样本,但它们之间可能存在很大的空洞。也就是说,潜空间中有很多区域是没有被训练数据覆盖的。当我们从这些区域中采样 \(z\) 时,decoder 无法正确地将其映射为有效的图像,因此生成的结果往往是模糊或无意义的。
所以,普通 AutoEncoder 更擅长表示学习,降维与去噪,特征提取,却不天然擅长稳定地生成新的高质量样本。而这,正是后面引出 VAE 的关键动机。
13.1.6 本章小结
到这里,我们已经知道了 AutoEncoder 的基本思想:
- 用 encoder 把输入压缩到 latent space
- 用 decoder 从 latent 表示重建原输入
- 通过重建误差训练模型
它告诉我们,神经网络可以学会一种有意义的潜在表示。但与此同时,它也暴露出一个问题:
普通 AutoEncoder 的潜空间虽然能表示数据,却未必规整、连续、可采样。
于是一个自然的问题就出现了:能不能让模型不仅会压缩和重建,还让 latent space 具有良好的概率结构,从而可以直接采样生成新样本?
这就把我们带到了下一节:Variational Autoencoder (VAE) (Kingma and Welling 2022)。