上一节我们已经把 DDPM 的前向过程讲清楚了。
我们知道,它先定义了一个固定的加噪链:
\[
x_0 \rightarrow x_1 \rightarrow x_2 \rightarrow \cdots \rightarrow x_T
\]
并且随着步数增加,图像里的结构会逐渐被噪声淹没,最后 \(x_T\) 会接近标准高斯分布。
那么,既然我们能把图像一步步加噪到高斯噪声,那能不能再从高斯噪声一步步走回来?
这就是反向扩散过程(Reverse Diffusion Process)的核心问题。
这一节,我们就来讲清楚三件事:
- 反向过程到底想学什么;
- 为什么它可以被建模成一步一步去噪;
- 为什么 DDPM 最后通常把训练目标写成预测噪声。
import random
import dnnlpy
import dnnlpy.models.ddpm.utils as dutils
import matplotlib.pyplot as plt
import torch
import torchvision.datasets as datasets
import torchvision.transforms.v2 as v2
from torch import Tensor
plt.rc('figure', dpi=100)
dnnlpy.set_matplotlib_format('highdpi')
print('PyTorch version:', torch.__version__)
PyTorch version: 2.12.1+cpu
14.3.1 如果前向能走,反向为什么不能走?
前向过程是我们自己设计的:
\[
q(x_t \mid x_{t-1}) = \mathcal{N}(x_t; \sqrt{1-\beta_t}x_{t-1}, \beta_t I)
\]
也就是说,我们知道怎么从 \(x_{t-1}\) 构造出 \(x_t\)。
但生成时,我们关心的是相反方向:
\[
x_T \rightarrow x_{T-1} \rightarrow x_{T-2} \rightarrow \cdots \rightarrow x_0
\]
第一次看到这里,很多人会有一个很自然的疑问:既然前向加噪这么简单,那直接把它倒过来不就行了吗?可惜事情没有这么简单。因为加噪本身是一个会丢信息的过程。
举个例子:如果你有一张清晰的猫图,给它加一点噪声,你仍然大概能看出这是一只猫;但如果我只给你一张带噪图,你并不能唯一确定它原来是哪一张清晰图。所以,如果用函数逆变换的方式来理解反向过程,就会发现它根本不满足单值性(single-valued)。也就是说,反向过程就是一对多的。一张带噪图像背后,可能对应很多种可能的清晰图像。
所以,反向过程不能简单理解成一个确定性求逆。它更合理的理解方式是:
给定当前的带噪图像 \(x_t\),下一步更干净的图像 \(x_{t-1}\) 应该服从某个条件概率分布。
我们把这个条件分布记作 \(q(x_{t-1} \mid x_t)\)。也就是说,已知当前第 \(t\) 步的含噪图像 \(x_t\),模型要给出上一步更干净样本 \(x_{t-1}\) 的概率分布。它描述的是真实扩散过程对应的反向单步分布。那么,这时候就会有一个问题:这个分布好求吗?
我们来看看贝叶斯公式:
\[
q(x_{t-1} \mid x_t) = \frac{q(x_t \mid x_{t-1}) q(x_{t-1})}{q(x_t)}
\]
前向分布 \(q(x_t \mid x_{t-1})\) 是我们自己设计的,这个好办。但 \(q(x_{t-1})\) 和 \(q(x_t)\) 呢?它们分别对应样本在第 \(t-1\) 步和第 \(t\) 步的边缘分布。也就是说:
\[
q(x_{t-1}) = \int q(x_{t-1} \mid x_0) q(x_0) dx_0, \qquad q(x_t) =
\int q(x_t \mid x_0) q(x_0) dx_0
\]
你看,它们都涉及到真实数据分布 \(q(x_0)\),而真实数据分布是我们无法直接建模的(如果知道了我们还要 DDPM 干嘛)。所以,这个反向条件分布 \(q(x_{t-1} \mid x_t)\) 是一个非常复杂的分布,我们根本无法直接求出它。
那怎么办?别忘了我们有真实图像!我们能不能利用它们?
当然。虽然 \(q(x_{t-1} \mid x_t)\) 很复杂,但如果我们把分布写成这种形式:
\[
q(x_{t-1} \mid x_t, x_0) =
\frac{q(x_t \mid x_{t-1}, x_0) q(x_{t-1} \mid x_0)}{q(x_t \mid x_0)}
\]
由于前向过程是马尔可夫链,根据马尔可夫性,我们有:
\[
q(x_t \mid x_{t-1}, x_0) = q(x_t \mid x_{t-1})
\]
上式简化为:
\[
q(x_{t-1} \mid x_t, x_0) =
\frac{q(x_t \mid x_{t-1}) q(x_{t-1} \mid x_0)}{q(x_t \mid x_0)}
\]
你会发现,右边的三项我们都是知道的!前两项是我们自己设计的前向过程,最后一项 \(q(x_t \mid x_0)\) 也可以通过前向过程的递推关系求出。也就是说,虽然 \(q(x_{t-1} \mid x_t)\) 很复杂,但 \(q(x_{t-1} \mid x_t, x_0)\) 却是一个简单的分布,我们可以直接求出它的解析表达式,进而一步步地去求出反向过程的条件分布。
实际上,可以证明的是,在前向过程的定义下,反向条件分布 \(q(x_{t-1} \mid x_t, x_0)\) 是一个高斯分布:
\[
q(x_{t-1} \mid x_t, x_0) =
\mathcal{N}(x_{t-1}; \tilde{\mu}_t(x_t, x_0), \tilde{\beta}_t I)
\]
其中:
\[
\tilde{\mu}_t(x_t,x_0) =
\frac{\sqrt{\bar{\alpha}_{t-1}}\,\beta_t}{1-\bar{\alpha}_t}\,x_0 +
\frac{\sqrt{\alpha_t}\,(1-\bar{\alpha}_{t-1})}{1-\bar{\alpha}_t}\,x_t
\]
\[
\tilde{\beta}_t = \frac{1-\bar{\alpha}_{t-1}}{1-\bar{\alpha}_t}\,\beta_t
\]
完整的证明见 (Luo 2022, eq. 71-84)。注意,这里的结果和论文的结果有点不一样。论文里忽略了部分常数项,因此写的是“正比于”,而这里我们把常数项也写出来了。
现在我们来做一个实验。使用 MNIST 数据集,假设我们手里有原始图像 \(x_0\),我们先把一张图像按照前向公式加噪到高斯噪声,然后再从高斯噪声一步步走回去。我们来看看这个过程中图像的变化。
root = dnnlpy.get_data_root()
transform = v2.Compose([v2.ToImage(), v2.ToDtype(torch.float32, scale=True)])
ds = datasets.MNIST(root, train=False, download=True, transform=transform)
idx = random.randrange(len(ds))
x0 = ds[idx][0].squeeze(0) # shape: (28, 28)
def denoise_v1(x0: Tensor, xt: Tensor, timestep: int, betas: Tensor) -> Tensor:
t = timestep
alphas = 1.0 - betas
alpha_t = alphas[t]
alpha_bars = alphas.cumprod(dim=0)
alpha_bar_t = alpha_bars[t]
alpha_bar_prev_t = alpha_bars[t - 1] if t > 0 else torch.tensor(1.0)
beta_t = betas[t]
param1 = alpha_bar_prev_t.sqrt() * beta_t / (1 - alpha_bar_t)
param2 = alpha_t.sqrt() * (1 - alpha_bar_prev_t) / (1 - alpha_bar_t)
mean = param1 * x0 + param2 * xt
variance = (1 - alpha_bar_prev_t) / (1 - alpha_bar_t) * beta_t
if t > 0:
return mean + variance.sqrt()
else:
return mean
T = 1000
betas = torch.linspace(0.0001, 0.02, steps=T)
xt = dutils.add_noise(x0, betas, T - 1)
trajectory = [xt.clone()]
for t in range(T - 1, -1, -1):
xt = denoise_v1(x0, xt, t, betas)
trajectory.append(xt.clone())
# We use step=8 here for better visualization
idx = torch.linspace(1000, 1, steps=8, dtype=torch.long)
trajectory = [trajectory[T - i] for i in idx - 1]
fig = plt.figure(1, figsize=(8, 2))
axes = fig.subplots(1, len(trajectory))
for i, ax in enumerate(axes):
ax.imshow(trajectory[i], cmap='gray')
ax.axis('off')
ax.set_title(f't={idx[i]}', fontsize=10)
fig.tight_layout(pad=0.5)
plt.show()
你看,我们成功恢复出了原始图像!但是,这里又有一个问题:我们在恢复图像的过程中利用了原始图像 \(x_0\)。可是我们生成图像就是要生成 \(x_0\) 的啊,如果我们都知道了 \(x_0\),那我们还要生成什么?
这时候神经网络就派上用场了。我们定义了一个带参数的条件分布 \(p_\theta(x_{t-1} \mid x_t)\),让它去近似 \(q(x_{t-1} \mid x_t, x_0)\)。
14.3.2 反向过程:学习 \(p_\theta(x_{t-1} \mid x_t)\)
本质上,反向过程要学的就是每一步的反向条件分布:
\[
p_\theta(x_{t-1} \mid x_t)
\]
也就是说,已知当前第 \(t\) 步的含噪图像 \(x_t\),模型要给出上一步更干净样本 \(x_{t-1}\) 的概率分布。
于是,整个生成链就可以写成:
\[
p(x_{0:T}) = p(x_T) \prod_{t=1}^{T} p_\theta(x_{t-1} \mid x_t)
\]
起点 \(p(x_T)\) 很简单,通常直接取标准高斯分布 \(\mathcal{N}(0, I)\)。这里的难点全都集中在每一步的反向条件分布 \(p_\theta(x_{t-1} \mid x_t)\) 上。那么,这个分布是什么样子的呢?我们又该如何去学习它呢?
在上一节里我们知道,反向条件分布 \(q(x_{t-1} \mid x_t, x_0)\) 本质上是一个高斯分布:
\[
q(x_{t-1} \mid x_t, x_0) =
\mathcal{N}(x_{t-1}; \tilde{\mu}_t(x_t, x_0), \tilde{\beta}_t I)
\]
所以我们可以大胆假设,我们要学的分布 \(p_\theta(x_{t-1} \mid x_t)\) 也是一个高斯分布:
\[
p_\theta(x_{t-1} \mid x_t) =
\mathcal{N}(x_{t-1}; \mu_\theta(x_t, t), \Sigma_\theta(x_t, t))
\]
模型实际上要学的就是每一步的均值 \(\mu_\theta(x_t, t)\) 和协方差 \(\Sigma_\theta(x_t, t)\)。
如果你了解一点 DDPM,可能你就会问了,不是说只要预测均值吗?
其实是的。我们观察协方差的表达式就会发现,它其实只是一个和时间步 \(t\) 相关的常数项:
\[
\tilde{\beta}_t = \frac{1-\bar{\alpha}_{t-1}}{1-\bar{\alpha}_t}\,\beta_t
\]
也就是说,如果我们直接把协方差固定成 \(\tilde{\beta}_t I\),就已经足够了。所以,在实际训练中,我们通常只让模型去预测均值 \(\mu_\theta(x_t, t)\),而把协方差 \(\Sigma_\theta(x_t, t)\) 固定成 \(\tilde{\beta}_t I\)。
14.3.3 为什么最后常写成预测噪声?
到这里,你可能会觉得,既然反向分布是高斯,模型主要学的是均值 \(\mu_\theta(x_t, t)\),那训练时直接预测这个均值不就可以了吗?
理论上当然可以。但 DDPM 在实践中通常采用一种更巧妙、也更稳定的参数化方式:
不直接预测均值,而是预测当前样本里混入的噪声 \(\epsilon\)。
也就是让模型学习:
\[
\epsilon_\theta(x_t, t)
\]
理由也很简单。我们知道,真实均值 \(\tilde{\mu}_t(x_t, x_0)\) 的表达式里其实是包含了原图 \(x_0\) 的:
\[
\tilde{\mu}_t(x_t, x_0) =
\frac{\sqrt{\bar{\alpha}_{t-1}}\,\beta_t}{1-\bar{\alpha}_t}\,x_0 +
\frac{\sqrt{\alpha_t}\,(1-\bar{\alpha}_{t-1})}{1-\bar{\alpha}_t}\,x_t
\]
所以,如果我们想把这个均值预测的准,由于这个均值本身依赖 \(x_0\),模型其实就等于在间接恢复原图信息。与其直接去预测这样一个形式复杂、并且随时间步变化的均值,我们更希望把学习目标改写成一个更简单、更稳定的形式。
我们知道,前向过程有一个闭式采样公式:
\[
x_t = \sqrt{\bar{\alpha}_t}x_0 + \sqrt{1-\bar{\alpha}_t}\epsilon
\]
也就是说,当前的带噪图像 \(x_t\) 是由原图 \(x_0\) 和噪声 \(\epsilon\) 混合而成的。我们可以把这个式子变形一下:
\[
\hat{x}_0 = \frac{1}{\sqrt{\bar{\alpha}_t}} (x_t - \sqrt{1-\bar{\alpha}_t}\epsilon)
\]
这里的噪声 \(\epsilon\) 是训练时我们自己采样进去的,所以它是已知的。这样我们就可以把噪声作为模型的训练目标,让模型去预测它,从而间接得到原图 \(x_0\) 的一个估计,并最终得到均值 \(\mu_\theta(x_t, t)\)。同时,我们也避免了直接预测一个随时间步变化的复杂均值的麻烦。况且预测噪声和预测均值本质上是等价的。
所以,DDPM 的最终训练目标通常写成:
\[
L(\theta) = \mathbb{E}_{t, x_0, \epsilon}
\left[ \| \epsilon - \epsilon_\theta(x_t, t) \|^2 \right]
\]
这里的推导是不严谨的。我们仅仅从直觉上说明预测噪声是合理的,并未严格说明其理论依据。如果从严格的概率建模角度来看,DDPM 的训练目标其实来自变分下界(ELBO),而常见的噪声预测损失,是在该目标基础上的一种等价或近似等价改写。这里先不展开完整推导,后面再详细说明。感兴趣的读者可以先看看 (Luo 2022, eq. 46-58, 115-130)。
14.3.4 DDPM 的训练目标:一个非常简单的 MSE
在上一节里,我们把 DDPM 的训练目标写成了一个预测噪声的均方误差:
\[
L(\theta) = \mathbb{E}_{t, x_0, \epsilon}
\left[ \| \epsilon - \epsilon_\theta(x_t, t) \|^2 \right]
\]
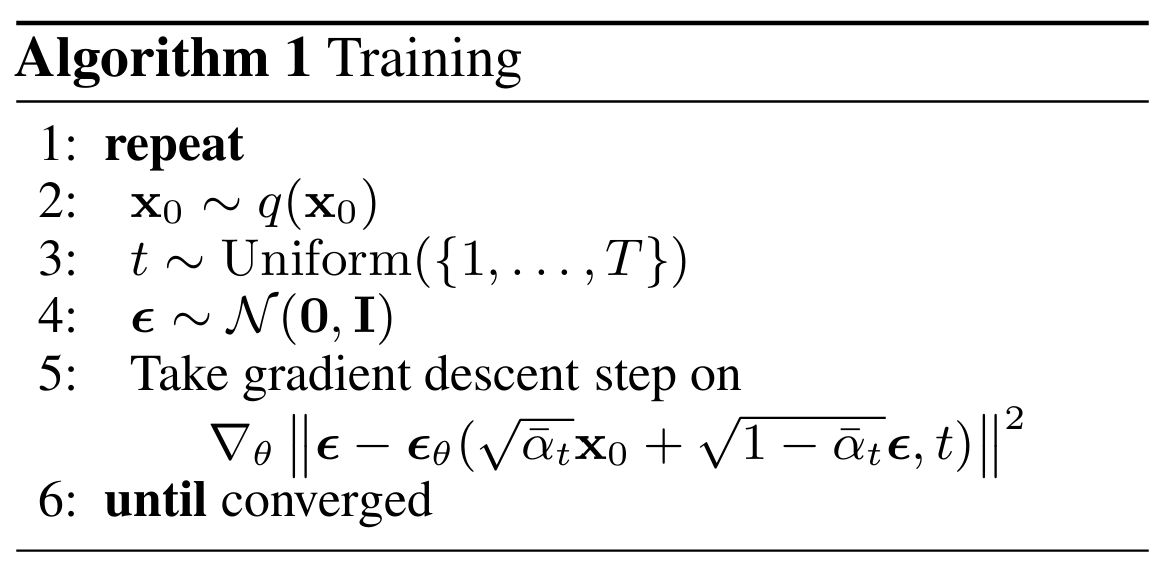
其中,\(x_0\) 是从真实数据 \(p_{\text{data}}\) 里采样得到的,\(t\) 是从 1 到 \(T\) 中随机挑选的一个时间步,\(\epsilon\) 是我们自己采样的高斯噪声。这个损失函数看起来有点过于简单:整个 diffusion model,最后经常就是在做一个噪声回归的均方误差。
但是,虽然表面上只是 MSE,背后其实对应着对反向扩散过程的概率建模。也就是说,这个简单的 MSE 损失函数,其实是从一个严谨的概率模型出发,经过一系列等价或近似等价的变换,最终得到的一个非常易于优化的训练目标。与很多深度学习网络不同,它的背后是有理论支撑的。我们用一段伪代码来描述这个过程:
你看,是不是很简单?别被它迷惑了。我们在后面会详细说明这个训练目标是怎么来的,以及它和概率建模之间的关系。
14.3.5 本章小结
到这里,我们可以把 14.1、14.2、14.3 三节串起来了。
第一步:定义前向加噪
我们人为设计一个固定过程,把真实数据一步步变成噪声:
\[
x_0 \rightarrow x_1 \rightarrow \cdots \rightarrow x_T
\]
并且最后 \(x_T\) 接近标准高斯分布。
第二步:把生成问题转成反向恢复问题
既然前向可以把数据推向噪声,那么生成时就从噪声反向走回来:
\[
x_T \rightarrow x_{T-1} \rightarrow \cdots \rightarrow x_0
\]
第三步:把反向过程建模成条件高斯
每一步不是直接求逆,而是学习:
\[
p_\theta(x_{t-1} \mid x_t)
\]
第四步:把训练目标变成预测噪声
利用前向过程的闭式公式,我们可以直接构造监督信号,让模型学习:
\[
\epsilon_\theta(x_t, t)
\]
这就把一个复杂的生成建模问题,变成了一个可以稳定优化的噪声回归问题。
这条逻辑链,就是最基础的 DDPM 训练框架。
到此,我们终于了解了 DDPM 的训练和采样流程。但是,我们还有很多细节没有讲清楚。比如模型输入里的时间步 \(t\) 要怎么表示?为什么 U-Net 特别适合做去噪网络?采样时具体怎么从 \(x_t\) 算出 \(x_{t-1}\)?这就要到下一节,来看看 DDPM 的一些细节设计。